장애물 배치 및 시나리오 관리
기본 조작

Edit - Scenario - Scenario Edit mode 에서 장애물을 생성, 배치, 삭제를 할 수 있다.
장애물 배치
Vehicle
22.R2.0 버전부터 Scenario File (.json) Load 시, 사용 계정 옵션에 Load할 차량이 없는 경우
Default 차량을 만들어 해당 차량을 불러옴.
Spawn Objects List
대상
Sedan : 2017_Hyundai_Grandeur 형상의 Default 차량
SUV : 2016_Hyundai_Santafe 형상의 Default 차량
Bus : 2016_Hyundai_Universe 형상의 Default 차량
Truck : 2012_Hyundai_HD65 형상의 Default 차량
Wagon : 2015_Toyota_Prius(HEV) 형상의 Default 차량
MPV : 2020_chlyser_pacifica_hybrid 형상의 Default 차량
미대상
Misc (소형 차량)
Custom
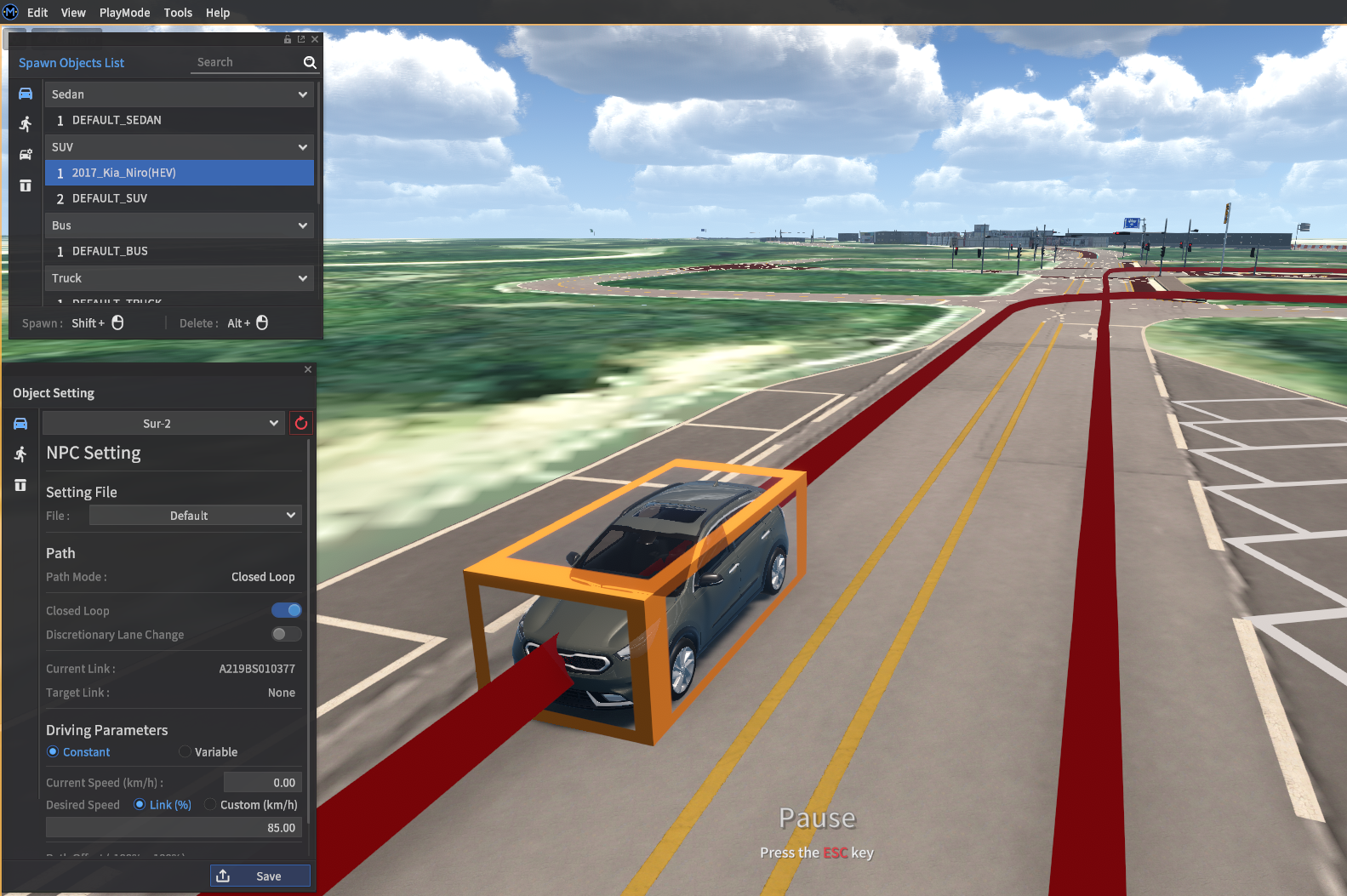
NPC Setting
Setting File
NPC Vehicle의 Setting(Path, Driving Parameters)값을 Preset 형태로 설정 가능함.
Setting File 저장 방법
Vehicle 옵션을 입력한 다음 하단의 Save를 누르면 NPC_Setting_*로 저장됨.
Path
Path Mode
Destination : 목적지 설정
No Destination : 목적지 없음
Closed Loop : 폐쇄 루프
Closed Loop : 토글 활성화 시, 폐쇄 루프
Discretionary Lane Change : 토글 활성화 시, Random 주행으로 차량이 임의로 차선을 변경함.
Current Link : 현재 차량이 위치한 링크
Target Link : 차량의 목표 링크
Driving Parameters
Current Speed (km/h) : 현재 속력
Constant : 하나의 값 입력
Desired Speed (km/h) : 목표 속력
Link (%) : 링크에 설정된 수치 대비 속력
80% 설정 시, 링크 속력이 50 km/h일 때 희망 속력은 40 km/h로 설정됨.
Custom (km/h) : 사용자 설정 속력
Path Offset (-100%~100%) : 차량의 차선 중앙 유지 정도를 나타냄. (왼쪽 - , 오른쪽 +)
Variable : Constant 항목과 동일하나 Range로 입력
Pedestrian
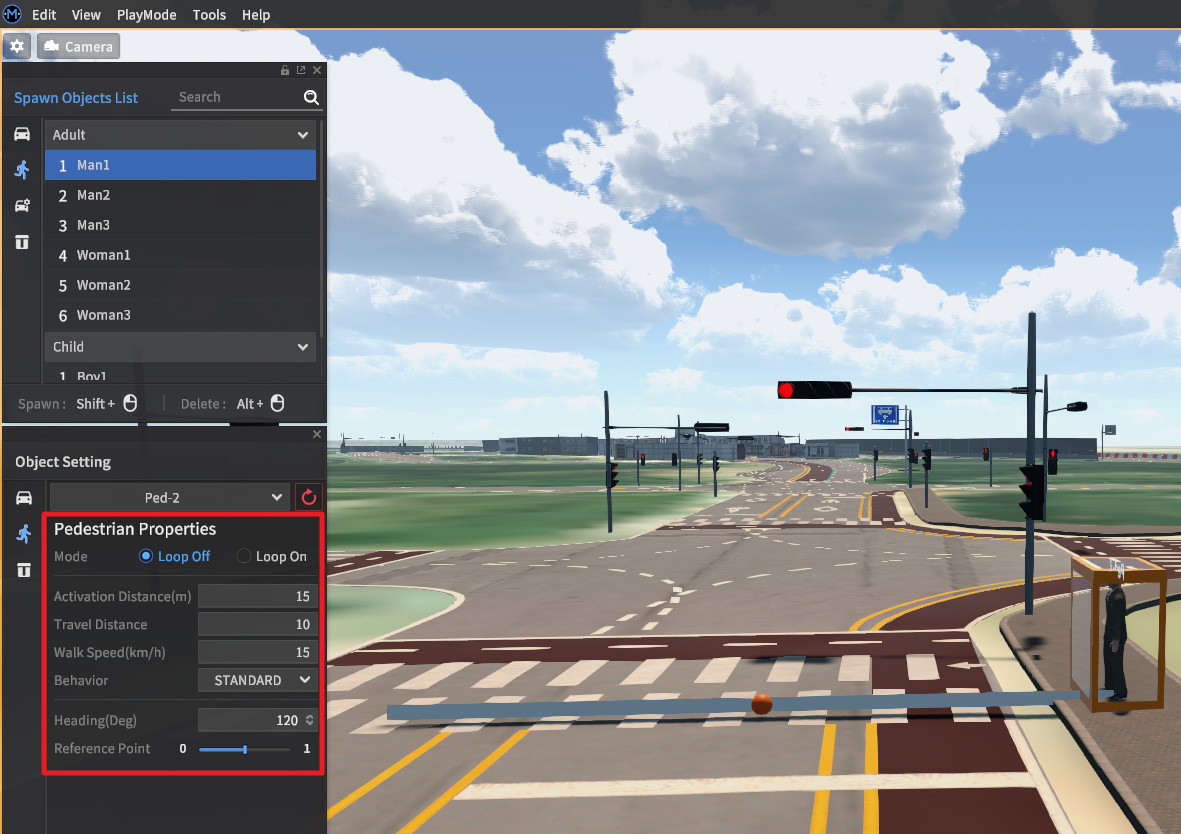
Spawn Objects List - Pedestrian 아이콘 선택
원하는 Pedestrian 종류를 선택
Shift + 왼쪽 클릭으로 생성하고 삭제는 Alt + 왼쪽 클릭
드래그 앤 드롭 으로 Pedestrian 위치 이동이 가능함. UPDATE
보행자가 길을 건너는 알고리즘에 대한 파라미터 수정 가능
Pedestrian Parameter
Mode
Loop Off : 알고리즘 진행 여부
Loop On : 알고리즘 반복 여부
Activation Distance : 차량과 Standard Point 사이의 거리로 AD 범위 안에 들어오면 보행자 알고리즘을 진행함.
Travel Distance : 보행자 알고리즘이 진행될 때 보행자가 이동할 수 있는 최대 이동 거리
Walk Speed : 보행자 이동 속도
Behavior : 보행자의 행동 선택
Standard : 기본 모드
Heading : 보행자의 방향
Reference Point : 차량과 보행자 사이 거리를 결정하는 기준점
Reference Point를 기준으로 Activation Distance 설정됨.
Object 배치
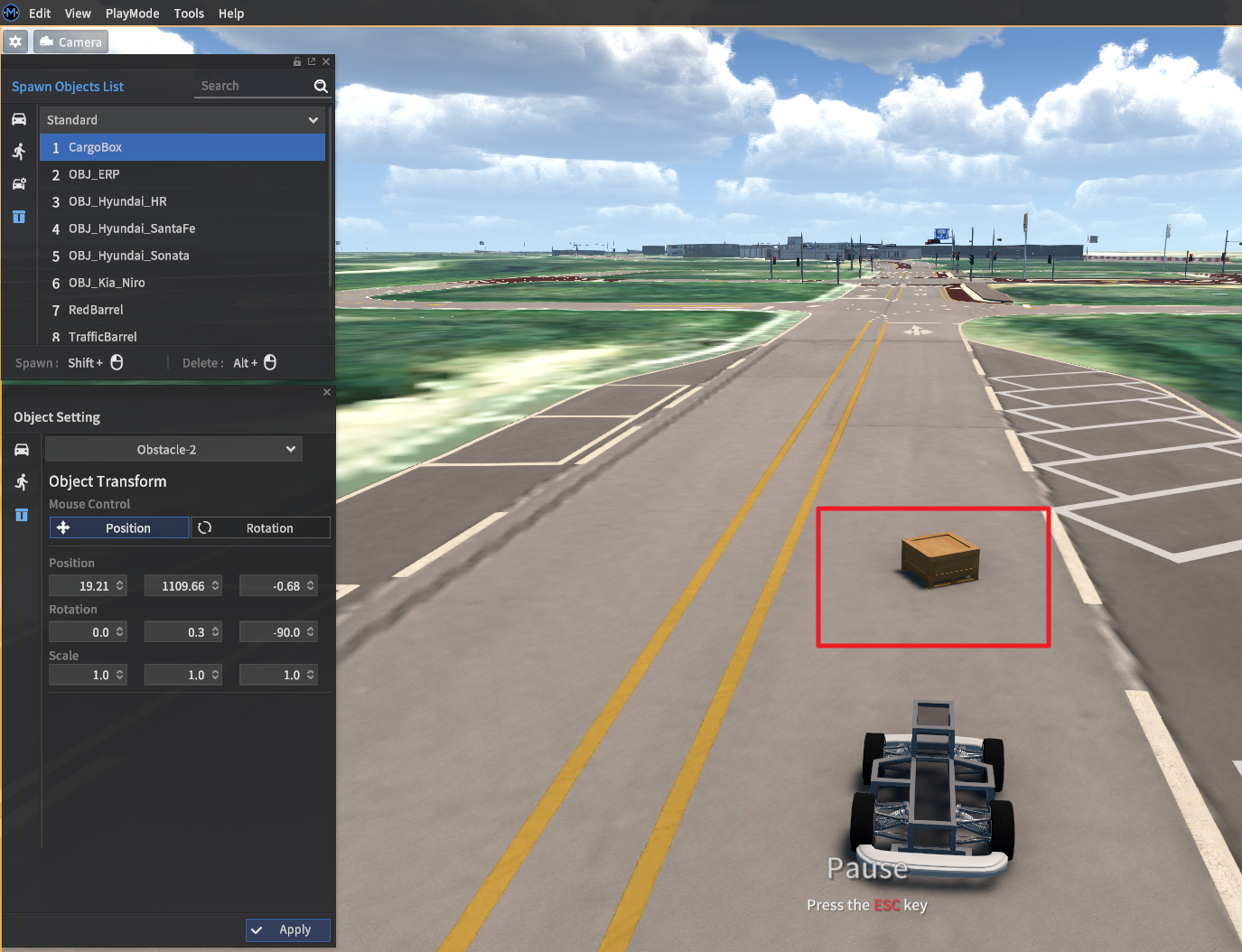
22.R2.0 버전부터 Object Position이 ISO에서 ENU 좌표계로 변경됨.
Spawn Objects List - Object 아이콘 선택
원하는 Object 종류를 선택
Shift + 왼쪽 클릭으로 생성하고 삭제는 Alt + 왼쪽 클릭
Object의 위치, 각도, 스케일 값 수정 가능
Position : 왼쪽에서부터 순차적으로 x, y, z 필드 값을 의미하며 Object의 위치 변경
Rotation : 왼쪽에서부터 순차적으로 x,y, z 필드 값을 의미하며 Object의 각도 변경
Scale : 왼쪽에서부터 순차적으로 x, y, z 필드 값을 의미하며 Object의 크기 변경
Denied Area (음영 구간) 배치

Edit - Scenario - Map Edit mode 선택함.

Denied Area 선택함.
Shift + 왼쪽 클릭으로 생성함. Alt + 왼쪽 클릭으로 삭제함.
Shaded Area의 Size, Position, Rotation 항목 수정 가능함
Size, Position, Rotation을 선택 후 드래그 앤 드롭 으로 Shaded Area 크기 조절/위치 이동/회전 가능함.
POS XYZ : 이동하고 싶은 축(X,Y,Z) 선택. 값 입력하거나 클릭·드래그 앤 드롭하여 Position 수정
e.g : x 10 만큼 이동
ROT PYR : 수정하고 싶은 축(P,Y,R) 선택. 값 입력하거나 클릭·드래그 앤 드롭하여 Rotation 수정
e.g : pitch 45도 회전
Size XYZ : 크기 수정하고 싶은 축(Size X,Y,Z) 선택. 값 입력하거나 클릭·드래그 앤 드롭하여 Size 수정
e.g : Size X 2.0m로 크기 변경
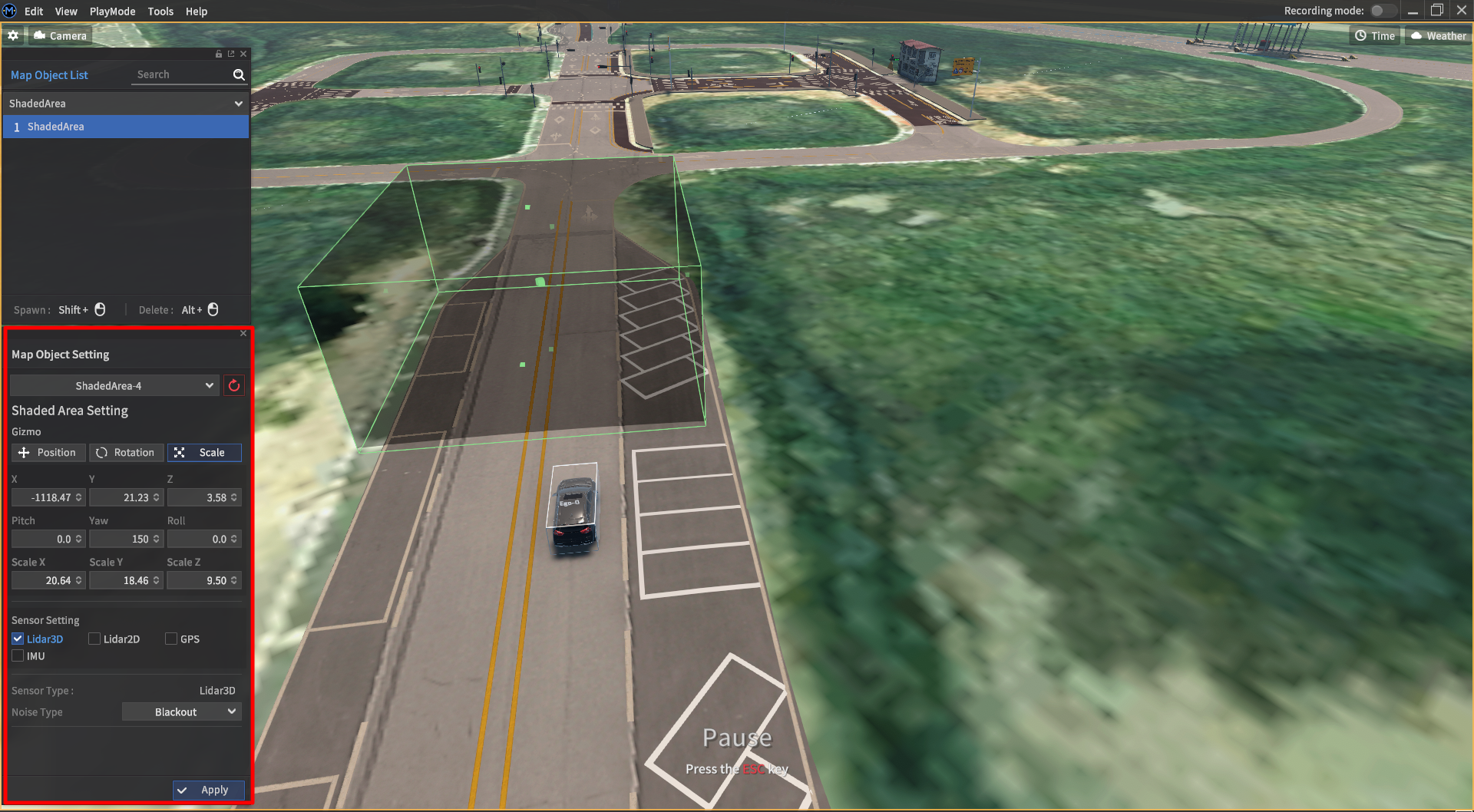
Sensor Setting에서 각 센서 토글을 클릭해서 세팅 가능.
GPS
Noise Type 내 Blackout 설정 시, Latitude, Longitude, Altitude 값 0으로 출력됨.
Noise Type 내 Noise 선택 후 Gaussian Noise내 파라미터에 따라 GPS 출력 값 변동됨.
IMU
Noise Type 내 Blackout 설정 시, Orientation , Angular Velocity, Linear Acceleration 값 0으로 출력됨.
Noise Type 내 Noise 선택 후 Gaussian Noise, Bias-Instability Noise , Random Walk Noise 파라미터에 따라 IMU 출력 값 변동됨.
2D/3D LiDAR
Noise Type 내 Blackout 설정 시, Point Cloud 값이 빈 값으로 출력됨.
Noise Type 내 Noise 선택 후 Gaussian Noise내 파라미터에 따라 LiDAR 출력 값 변동됨.
시나리오 관리
Save&Load
22.R2.0 버전부터 Network Data 구분함.
-기존엔 Built-in Scenario 파일(.json)에서 네트워크 파일(Network Data)을 참조하여 불러왔으나 두 파일을 각각 읽어올 수 있게 분리함.
2. 22.R2.0 버전부터 Simulator 최신 버전에서 이전 버전의 Scenario File(.json)이 호환 가능하도록 수정함
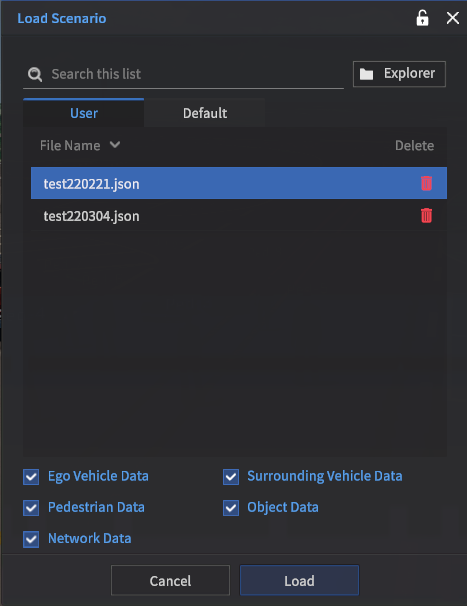
Spawn Objects List - Scenario - Load Scenario 클릭
현재 자신의 차량, 차량, 보행자, 장애물의 정보, 네트워크 데이터를 저장하고 로드할 수 있다.
Reset
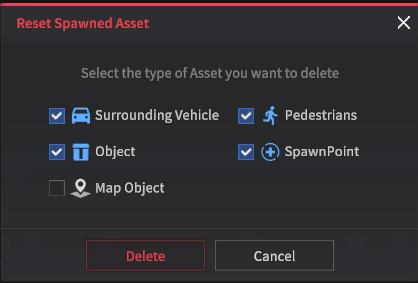
현재 맵에 있는 모든 차량, 보행자, 장애물, Denied Area를 일괄적으로 삭제할 수 있다.